LED光源亮度与最大亮度梯度测量方法(GB/T 45603-2025)
发表时间:2026-05-13
在道路车辆用LED光源的性能评价中,发光面的亮度分布及明暗截止线附近的亮度梯度是核心指标之一。GB/T 45603-2025对这两项参数的测量方法作出了详细规定。本文对该标准中的测量步骤和计算逻辑进行系统解读。
一、亮度测量
亮度测量的目标是获取LED光源整个发光面上各点的亮度分布数据,为后续梯度计算提供基础。
测量准备
测量开始前,须将亮度测量装置的轴向与LED光源的机械基准系统对准。机械基准系统的定义(如基准轴和基准面)依据相关数据活页的规定执行。对准偏差会直接导致后续亮度梯度计算出现误差。
设备分辨率要求
亮度测量设备应具备合适的分辨率。对于50μm的测量距离,分辨率控制在10μm至20μm之间是合适的。如果使用分辨率更高的设备(例如分辨率优于10μm),则需对相邻亮度测量值进行算术平均,使最终数据等效于10μm至20μm分辨率下的测量结果。这一处理既能保留必要的空间细节,又可降低过高的数据噪声。
扫描范围与步长
亮度测量需在x方向和y方向按等间距栅格进行。扫描区域必须覆盖光源的整个发光面。标准指出,扫描面积的大小不影响测量结论,前提是测量范围确实覆盖全部发光区域。实际操作中建议将发光面边界向外扩展少许,以确保边缘数据完整。
工况记录
在亮度测量过程中,必须同步记录以下关键参数:对于电压驱动型LED光源,记录试验电压Uent;对于电流驱动型LED光源,记录驱动电流I;同时记录与测量相关的温度(如环境温度或光源壳体温度)。这些参数是亮度数据可追溯、可复现的基础。
测量不确定度
若测量结果用于判定合格与否,报告必须同时提供扩展测量不确定度。这意味着亮度数值本身不是唯一的判定依据,其置信区间也应被纳入考量。
二、最大亮度梯度计算
最大亮度梯度的计算用于评价明暗截止线的锐度,是衡量LED光源光学性能的关键指标。标准给出了四个计算步骤。
步骤1:沿截止线方向求平均亮度
对于所有x坐标(通常为水平方向),计算沿y轴(通常为垂直方向,即明暗截止线产生的一侧)测得的亮度数据的平均值,记作L(xc)。这一步相当于在平行于截止线的方向上对亮度进行平滑,以消除局部细小波动的干扰。
步骤2:线性插值,获得统一步长数据
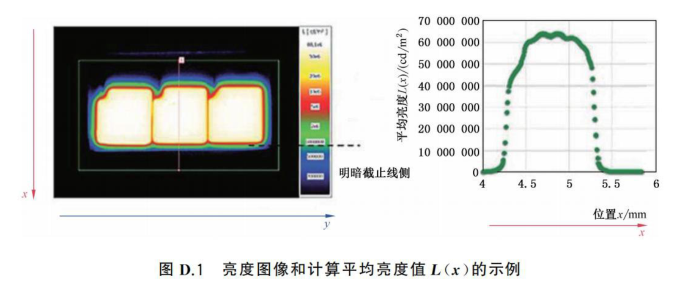
使用计算得到的平均亮度L(xc),进行线性插值,生成步长为s的平均亮度数据序列。步长s应不大于评估距离p的1/50。评估距离p(单位:μm)在光源数据活页中规定。例如,若p=500μm,则s≤10μm。插值保证了后续梯度计算的数值稳定性。
步骤3:计算亮度梯度Gp
基于步长s下的平均亮度L(x),对所有x位置按以下公式计算亮度梯度:
Gp=L(x+s)−L(x)sGp=sL(x+s)−L(x)
该公式反映了在水平方向每微米移动时亮度的变化率。Gp的最大值即为该LED光源的最大亮度梯度。
步骤4:记录最大值
在全部x位置计算出的Gp中,取最大值Gp,max作为最终评定指标。
三、实际应用示例
标准中给出了两个典型示例,便于操作者理解。
示例1(电流驱动,规定了Tp点):测量条件为I=600mA,温度Tp=50°C。结果为G50μm,max=0.95。
示例2(电压驱动,带集成散热装置):测量条件为Uent=13.5V DC,环境温度Tamb=25°C,稳定时间30min。结果为G50μm,max=0.95。
两个示例中最大亮度梯度均为0.95,表明在50μm评估距离下亮度变化率达到该数值。
四、对检测设备的要求
执行上述测量,需要具备以下条件:高空间分辨率的亮度成像仪(如二维亮度计),分辨率优于10μm;精确的三轴位移平台或自动扫描系统,保证栅格对准与步长控制;可控的驱动电源和温度记录装置;符合标准要求的后处理软件,能够实现平均、插值和梯度计算。
三恩时旗下光学检测产品线可提供满足GB/T 45603-2025要求的亮度测量系统及配套分析软件,适用于LED光源、车灯模组、显示面板等产品的亮度均匀性与截止线质量评价。如需了解具体型号与实测案例,欢迎联系。
- CC120看样台——汽车零部件外观检测专用灯箱
- 印刷行业标准光源怎么选?LED-D65与LED-D50全解析
- 从“试错式调色”到“一键出配方”——PeColor AI正在颠覆液体硅胶配色
- 天友利T60+标准光源箱:为涂料颜色检测打造标准化的目视对色环境
- 沃尔玛验厂指定标准光源箱:三恩时 WEM60 Color LED 标准光源箱